Интернет-магазин
ООО «3ДТУЛ»
![]() $$
$$
Россия, г. Москва, ул. Дорогобужская, д. 14, стр. 4, офис 302
Интернет-магазин
ООО «3ДТУЛ»
![]() $$
$$
Россия, г. Москва, ул. Дорогобужская, д. 14, стр. 4, офис 302
Пункт выдачи товаров расположен по адресу:
614039, Россия, Пермь, улица Пионерская, 15, БЦ Пионерский
с 09:00 до 19:00
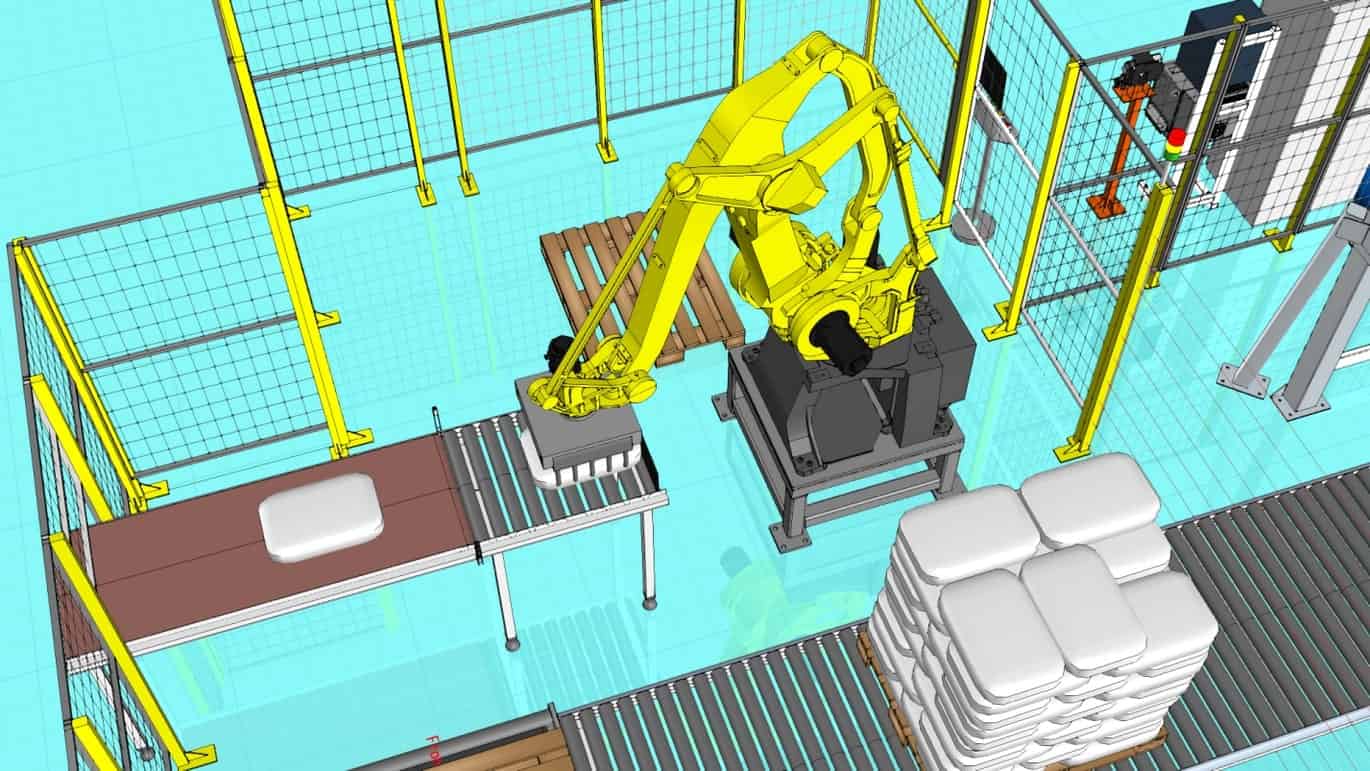
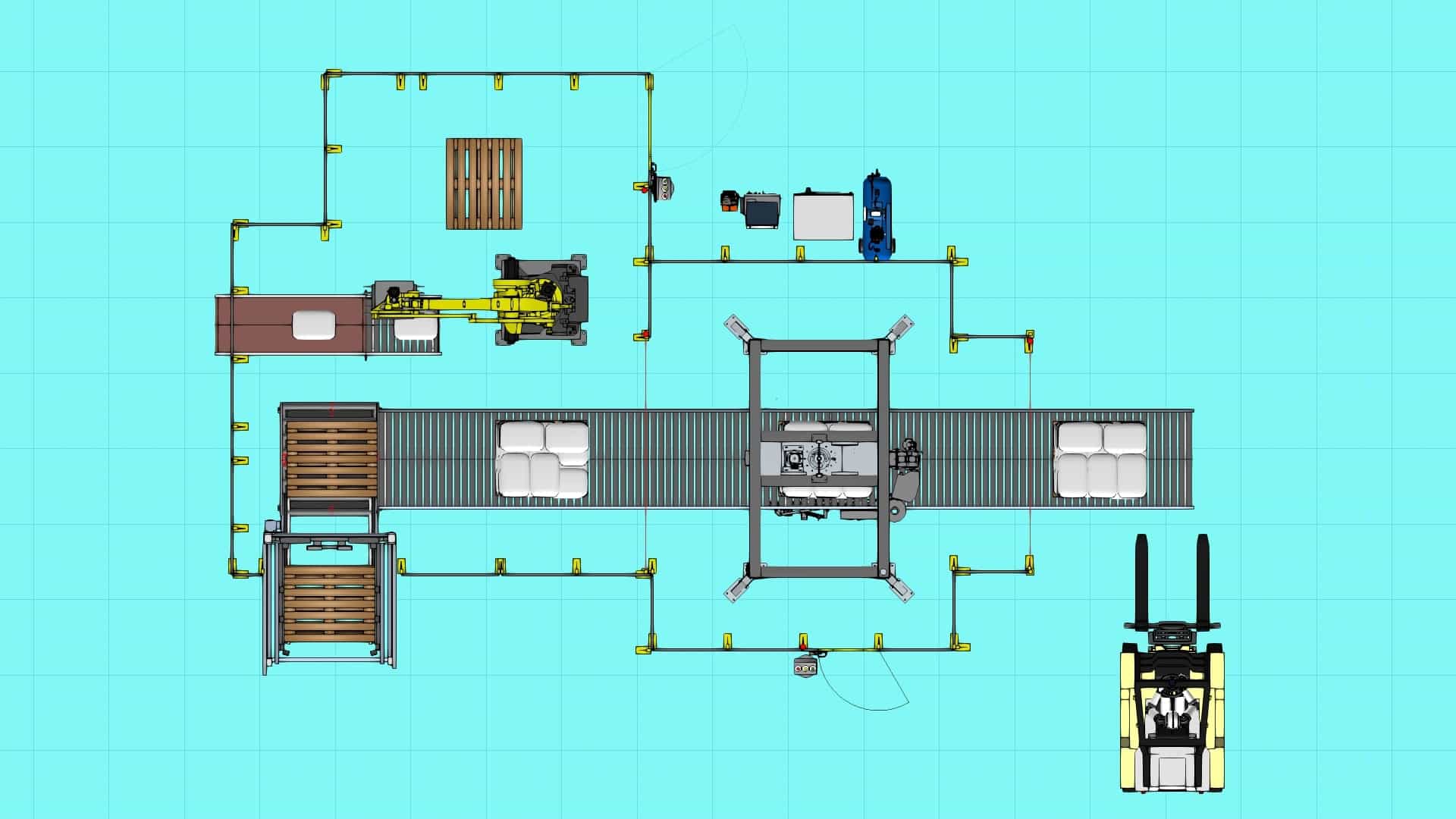
Назначение данного комплекса – автоматизация процесса паллетирования готовой продукции с помощью робота манипулятора.
Роботизированное паллетирование — это укладка продукции на паллету по запрограммированной схеме с использованием робота-манипулятора.
Робототехнический комплекс (РТК) позволяет аккуратно, быстро и точно загружать (разгружать) на паллеты продукцию разных форм и габаритов. Робот, оснащенный многофункциональным захватом, справляется с десятками комбинаций упаковочных схем и пакетов на поддоне. Скорость и точность роботов, используемых для паллетирования, во много раз превосходят те же параметры человеческого труда.
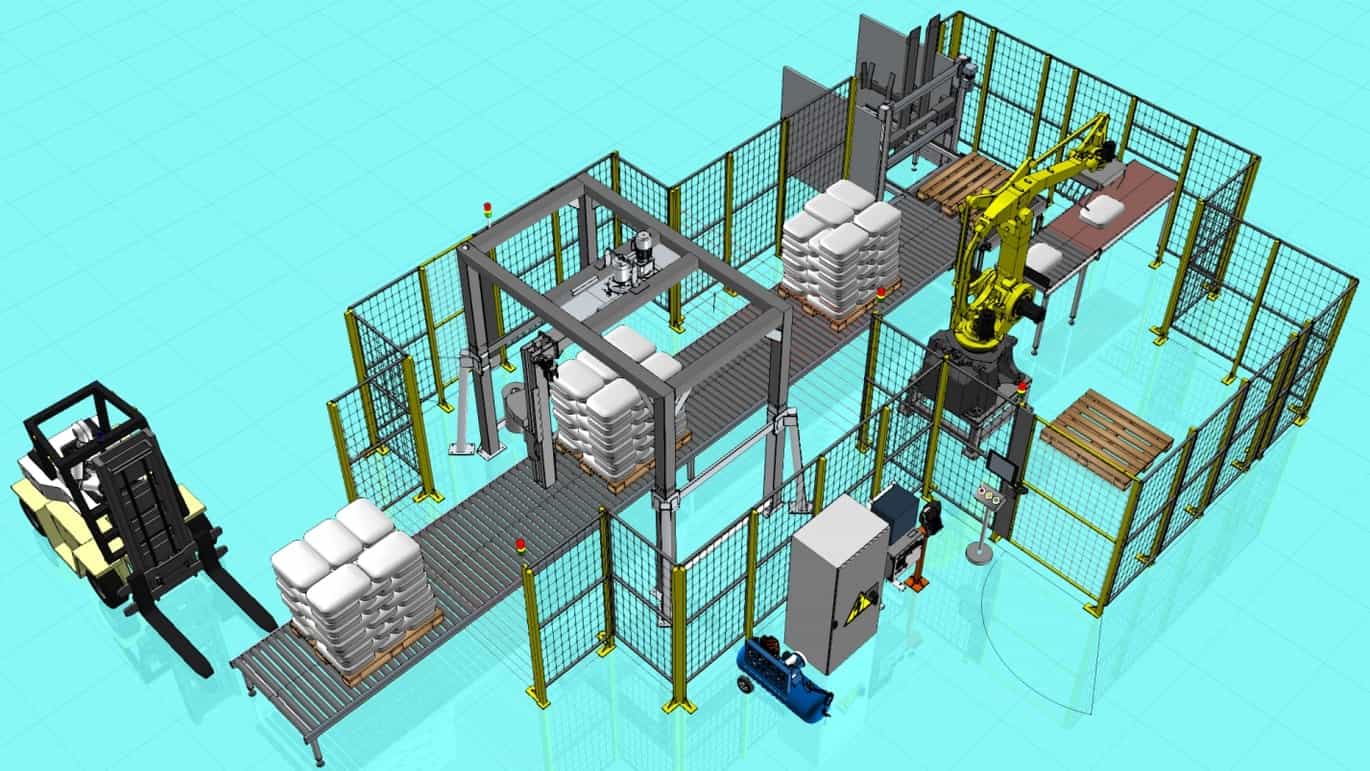
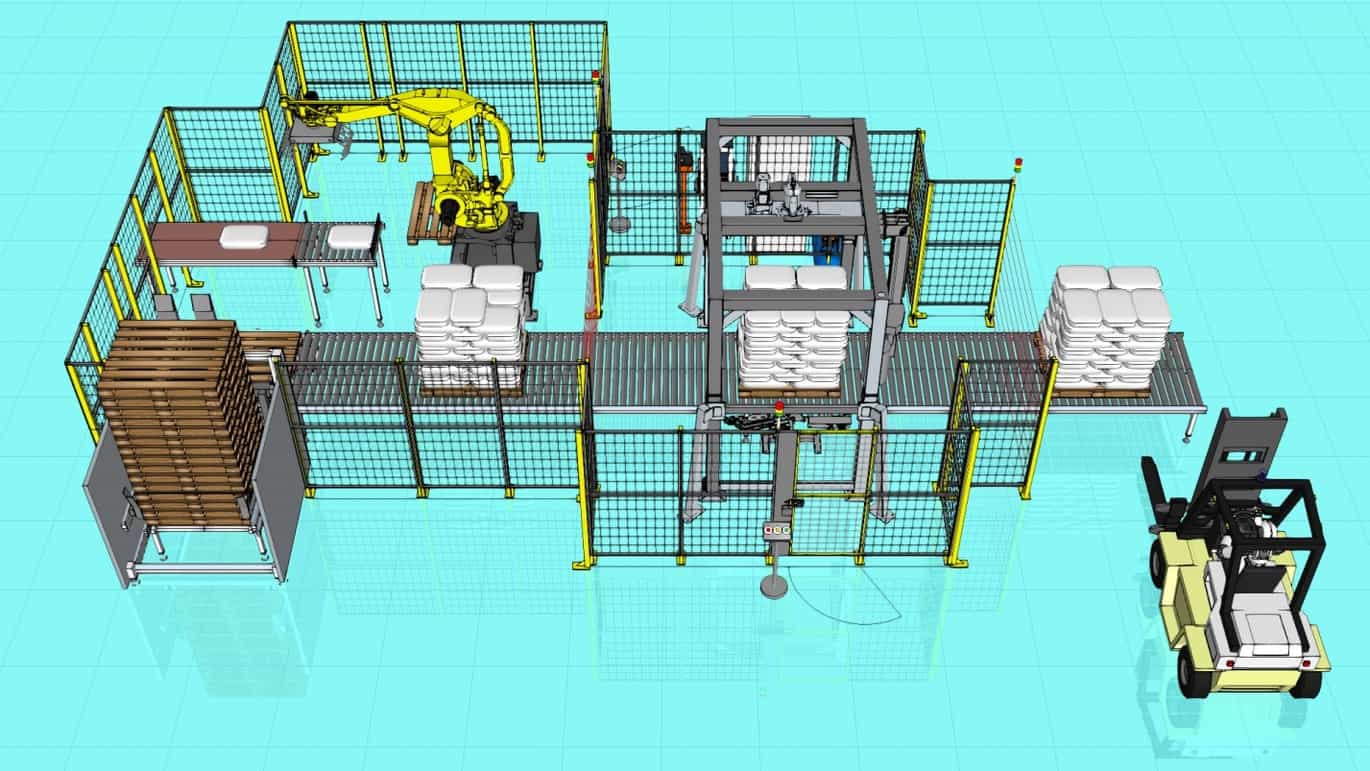
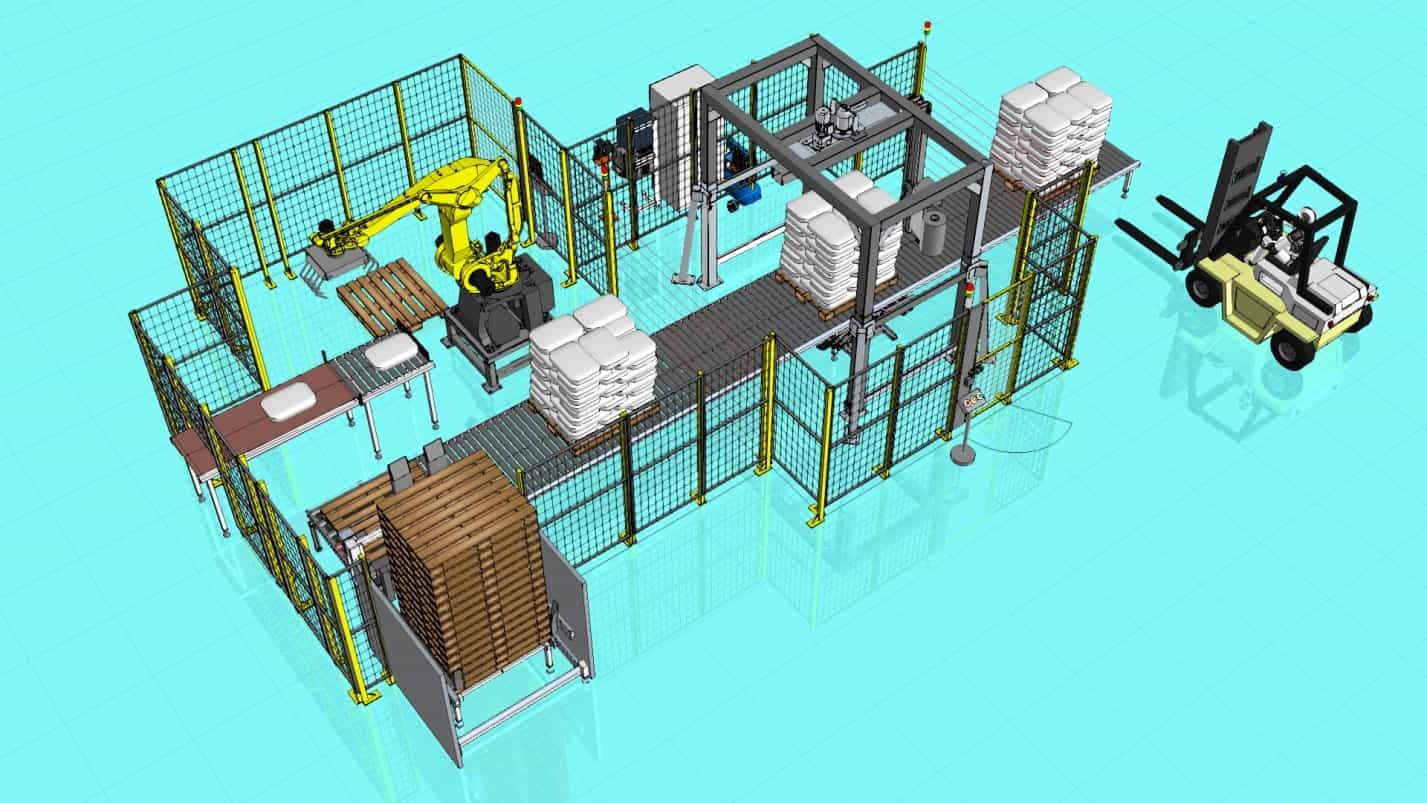
В состав роботизированных упаковочных комплексов входит:
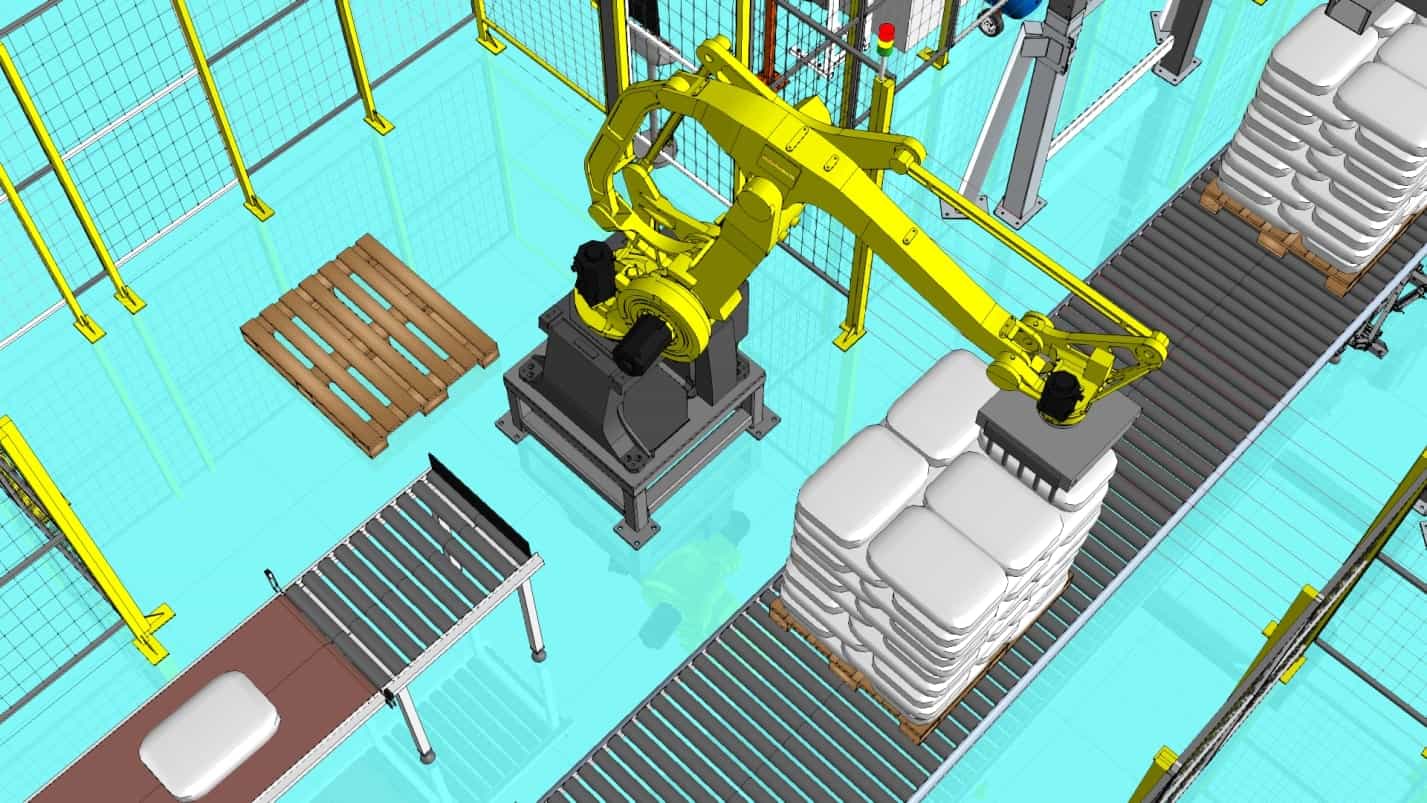
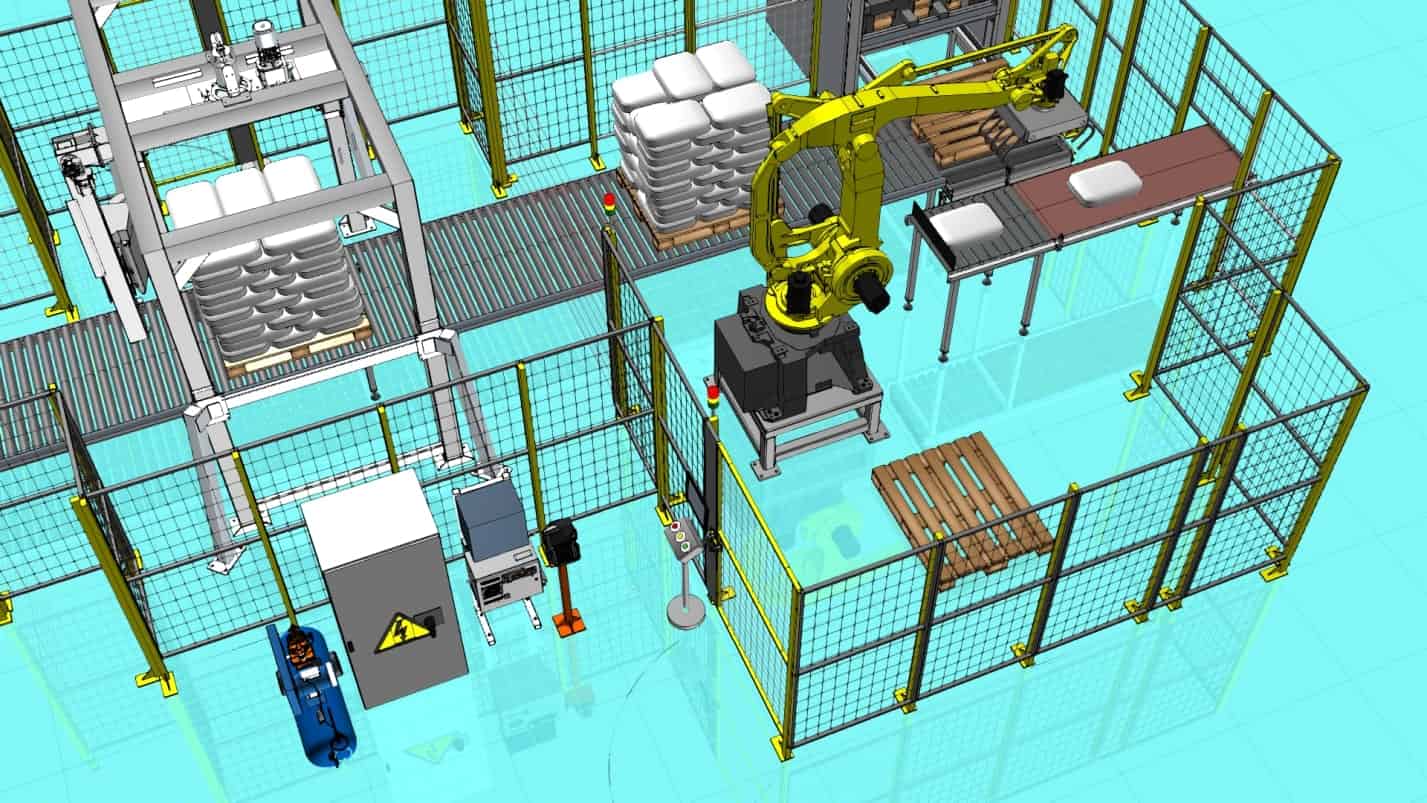
Робот-паллетайзер: паллетоукладчики серии M-410, разработанные компанией, первой в мире создавшей специализированный робот для паллетирования, позволяют повысить скорость операций паллетирования и погрузочно-разгрузочных работ. Данная компактная четырех-осевая модель подойдет для высокоскоростного выполнения операций по паллетированию, сборке, машинной обработке и перемещению деталей.
Универсальный вилочный захват: захватное устройство с сервоприводом полностью интегрируется с полым запястьем робота, обеспечивая рациональную и экономичную прокладку кабелей. Кроме того, сервоусилитель для шести осей управляет захватным устройством с сервоприводом как пятой осью.
Устройство хранения и автоматической подачи поддонов
Конвейеры перемещения паллет и продукции: эта система предназначена для перемещения паллет и мешков от упаковочной машины или магазина паллет, до манипулятора. Конвейерная система состоит из роликового конвейера, накопителя паллет, кросс-секции конвейера для отвода паллеты в сторону. (ОПЦИОНАЛЬНО)
Автоматический паллетообмотчик
Система безопасности (сетчатые ограждения, световые барьеры, сигнальные лампы и датчики)
Время для технологического цикла составит не более 8 секунд
Комплекс рассчитан под мешки весом до 50 кг
Паллета поступает из накопителя паллет по рольгангу, паллета поступает в зону загрузки робота. Также к манипулятору поступают по ленточному конвейеру мешки разного типоразмера. Робот с вилочным захватом осуществляет укладку мешков на паллету согласно выбранной схеме раскладки. Далее по завершению процесса укладки, готовая паллета следует на станцию обмотки стретч пленкой, далее в зону выгрузки погрузчиком.
Заполните форму и вы получите всю нужную информацию о выбранном оборудовании:
Снизим цену от цены конкурентов, если вы нашли дешевле
Подпишитесь на последние обновления и узнавайте о новинках и специальных предложениях первыми